Твердые тела под действием внешних сил деформируются, т.е. изменяют форму или объем. Тела, которые после прекращения действия внешних сил полностью восстанавливают свои первоначальные размеры и форму, называются упругими, а такие деформации -- упругими. Упругие деформации происходят в том случае, если сила, вызвавшая деформацию, не превосходит некоторой, определенной для каждого конкретного тела (материала), величины.
Если тело после устранения внешней силы остается полностью деформированным, оно является абсолютна неупругим (пластичным).
При деформации тел в них возникают внутренние силы. В упругих телах они определяются величиной и видом деформации и после прекращения действия внешних сил возвращают телу его первоначальные размеры и форму.
Существует множество видов упругих деформаций: одностороннее растяжение (и сжатие), всестороннее растяжение (и сжатие), изгиб, сдвиг, кручение н др. Любую упругую деформацию можно свести к двум основным: растяжению (или сжатию) и сдвигу.
Основные закономерности упругих деформаций были сформулированы английским физиком Робертом Гуком в 1675 году. Закон, носящий его имя, заключается в следующем:
Получим математическое выражение для этого закона применительно к деформации однородного растяжения, которая изучается в данной работе.
Пусть к тонкому стержню (проволоке) длиной ![]() , один конец которого закреплен,
приложена внешняя растягивающая сила
, один конец которого закреплен,
приложена внешняя растягивающая сила ![]() . Стержень получил некоторое
абсолютное удлинение
. Стержень получил некоторое
абсолютное удлинение ![]() . Количественной характеристикой деформации может
служить
. Количественной характеристикой деформации может
служить ![]() или относительное удлинение
или относительное удлинение
![]() , называемое также в
общем случае относительной деформацией.
, называемое также в
общем случае относительной деформацией.
Относительное удлинение -- отвлеченное число, указывающее, на какую
часть увеличилась первоначальная длина стержня. Существует понятие однородной
деформации, при которой каждый элемент стержня произвольной длины ![]() имеет такое же относительное удлинение, как и весь стержень:
имеет такое же относительное удлинение, как и весь стержень:
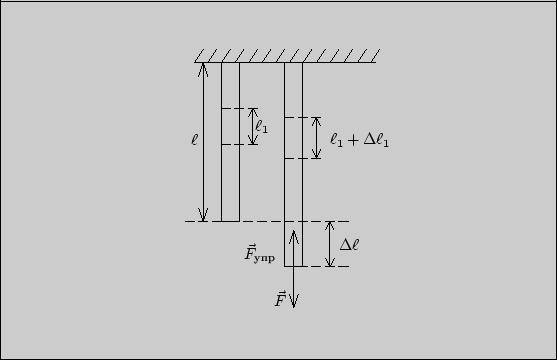
Рис. 1
Таким образом, ![]() - количественная характеристика деформации
- количественная характеристика деформации
как всего
стержня, так и любой его части, т.е. исчерпывающая характеристика однородной
упругой деформации.
Сила упругости
![]() , возникающая в растянутом стержне, оценивается
по внешней растягивающей силе
, возникающая в растянутом стержне, оценивается
по внешней растягивающей силе ![]() . Из условия равновесия стержня имеем:
. Из условия равновесия стержня имеем:
Деформации, независящие от времени, называются стационарными. При этом стационарные деформации покоящегося или равномерно движущегося тела называются статическими.
Р.Гук на опыте установил, что абсолютное удлинение в случае малых деформаций
прямо пропорционально первоначальной длине стержня и растягивающей силе и
обратно пропорционально его площади поперечного сечения ![]() :
:
Коэффициент пропорциональности
![]() зависит от рода материала и
является характеристикой его упругих свойств. Это коэффициент упругости,
определяемый на опыте, а для некоторых тел рассчитываемый теоретически из
молекулярных представлений.
зависит от рода материала и
является характеристикой его упругих свойств. Это коэффициент упругости,
определяемый на опыте, а для некоторых тел рассчитываемый теоретически из
молекулярных представлений.
Величина, обратная коэффициенту упругости, называется модулем Юнга:
Для относительной деформации из выражения (2) имеем:
Отношение ![]() называется упругим напряжением
называется упругим напряжением ![]() . Смысл выражения
(4) -- относительная деформация прямо пропорциональна упругому напряжению:
. Смысл выражения
(4) -- относительная деформация прямо пропорциональна упругому напряжению:
Тогда физический смысл модуля Юнга заключается в следующем: он равен
напряжению, соответствующему увеличению длины стержня вдвое, если бы при такой
нагрузке тело оставалось упругим и подчинялось бы закону Гука. Действительно,
![]() численно равно
численно равно ![]() при
при ![]() , т.е. при
, т.е. при
![]() .
.
На самом деле подавляющее большинство материалов разрывается раньше, чем они
будут растянуты вдвое, поэтому фактически к стальному стержню нельзя приложить
напряжение, равное модулю Юнга. Но это совсем не означает, что его вообще нельзя
определить на опыте. В данной работе используется один из косвенных методов
определения этой одной из важных характеристик упругих свойств тел. В частности, от
величины этого модуля зависит энергия и плотность энергии упруго деформированных
тел иди сред. Величины модуля Юнга приводятся для разных материалов в
справочных таблицах, для стали и железа он равен
![]() Па или
Па или
![]() .
.
Можно связать полученные выражения и с той формой закона, которая изучается в школе.
Коэффициент
Для стержней этот коэффициент можно рассчитать, для пружин определяется из опыта.
(Деформация проволоки в пружине имеет сложный характер и не может быть сведена
только к растяжению.) Упругость (жесткость) определяется только упругими
свойствами тела ![]() и его первоначальными размерами
и его первоначальными размерами ![]() ,
, ![]() .
.
Часто выражение (7) записывают в проекции на ось ![]() :
:
Сила упругости прямо пропорциональна абсолютному удлинению. Направление силы упругости противоположно направлению внешней растягивающей или сжимающей силы.