При решении обыкновенных дифференциальных уравнений первого порядка, часто встречающихся при построении математических моделей различных явлений и процессов, нередка проблема невозможности или сложности решения данных уравнений.
В подобных ситуациях для решения обыкновенных дифференциальных
уравнений
первого порядка используют рассматриваемые в рамках данной лабораторной
работы численные методы. Суть применяемых численных методов заключается
в
том, что для заданного обыкновенного дифференциального уравнения вида ![]() или
или ![]() с
начальными условиями, характеризующими координаты точки
с
начальными условиями, характеризующими координаты точки ![]() на некотором отрезке
на некотором отрезке
![]() ,
необходимо рассчитать приближенное значение функции
,
необходимо рассчитать приближенное значение функции ![]() в точке с координатами
в точке с координатами ![]() .
Осуществляется деление данного отрезка на определенное количество
равных
меньших отрезков или шагов в зависимости от заданного значения
количества
шагов
.
Осуществляется деление данного отрезка на определенное количество
равных
меньших отрезков или шагов в зависимости от заданного значения
количества
шагов ![]() или значения фиксированного шага
или значения фиксированного шага ![]() , расчет
приближенного значения функции со значением абсциссы конечной точки на
каждом из полученных отрезков, при этом приближенное значение функции
, расчет
приближенного значения функции со значением абсциссы конечной точки на
каждом из полученных отрезков, при этом приближенное значение функции
![]() в точке с координатами
в точке с координатами ![]() определяется как
значение функции со значением абсциссы
конечной точки последнего из полученных отрезков.
определяется как
значение функции со значением абсциссы
конечной точки последнего из полученных отрезков.
Рассмотрим логические основы реализации методов Эйлера, Рунге-Кутта
второго
и четвертого порядков для выполнения приближенных решений обыкновенных
дифференциальных уравнений первого рода в зависимости от различных
значений
![]() ,
, ![]() ,
, ![]() ,
, ![]() или
или ![]() ,
заложенных в программу "APROXDFE".
,
заложенных в программу "APROXDFE".
Исходя из уравнения касательной, проходящей из точки с координатами ![]() к
графику исходной
функции
к
графику исходной
функции ![]() , то есть
, то есть ![]() ,
учитывая, что
,
учитывая, что ![]() или
или ![]() и
и ![]() , получим соотношение:
, получим соотношение: ![]() .
.
Таким образом, в методе Эйлера вычисление приближенного значения
координат
точки исходной функции с координатами ![]() , исходя из
приближенных значений координат точки
, исходя из
приближенных значений координат точки ![]() исходной функции, осуществляется
согласно следующим соотношениям:
исходной функции, осуществляется
согласно следующим соотношениям:
Полученные соотношения можно получить и другими способами.
Например, используя формулировку вычисления определенного интеграла
для
функции ![]() , учитывая, что
, учитывая, что ![]() или
или ![]() и
и ![]() , можно получить следующее
соотношение:
, можно получить следующее
соотношение:

По формуле прямоугольников получим, что

Тогда вычисление приближенных значений координат точки исходной функции
с
координатами ![]() , исходя из
приближенных значений координат точки
, исходя из
приближенных значений координат точки ![]() ,
по методу Эйлера осуществляется согласно следующим
соотношениям:
,
по методу Эйлера осуществляется согласно следующим
соотношениям:
Также соотношения метода Эйлера можно получить как частный случай методов Рунге-Кутта.
В методах Рунге-Кутта определенный интеграл определяется в виде интерполяционного многочлена согласно следующему соотношению:

где ![]() - коэффициенты, зависящие от S;
- коэффициенты, зависящие от S; ![]() - функции, зависящие от вида подынтегральной функции
- функции, зависящие от вида подынтегральной функции ![]() и
значения фиксированного шага
и
значения фиксированного шага
![]() .
.
В общем случае значения ![]() и
и ![]() определяются согласно следующим соотношениям:
определяются согласно следующим соотношениям:
Значения ![]() ,
, ![]() и
и ![]() получают из соображений
высокой точности вычислений.
получают из соображений
высокой точности вычислений.
Если ![]() и
и ![]() ,
то получим соотношение:
,
то получим соотношение:

Таким образом, метод Эйлера является методом Рунге-Кутта первого порядка.
В данной лабораторной работе метод Эйлера ("METHOD OF EULER") имеет следующую реализацию:
Итерация с индексом ![]() :
:
На искомом отрезке ![]() при соблюдении условия
при соблюдении условия ![]() , исходя из вводимого или рассчитанного
значения фиксированного шага
, исходя из вводимого или рассчитанного
значения фиксированного шага
![]() (при вводимом значении количества шагов
(при вводимом значении количества шагов ![]() по
формуле
по
формуле ![]() , выбирается
абсцисса точки исходной функции с координатами
, выбирается
абсцисса точки исходной функции с координатами ![]() , то
есть
, то
есть ![]() , согласно следующему
соотношению:
, согласно следующему
соотношению: ![]() .
.
Осуществляется вычисление приближенного значения ординаты точки
исходной
функции с координатами ![]() ,
то есть
,
то есть ![]() , согласно следующим
соотношениям:
, согласно следующим
соотношениям:
Если достигнута истинность выражения ![]() , то
итерации
прекращаются, количество шагов итераций
, то
итерации
прекращаются, количество шагов итераций ![]() , и приближенное
значение исходной функции
, и приближенное
значение исходной функции ![]() в точке с координатами
в точке с координатами
![]() определятся согласно
соотношению
определятся согласно
соотношению ![]() .
.
Если ![]() , то осуществляется переход к
следующей итерации.
, то осуществляется переход к
следующей итерации.
В методе Рунге-Кутта второго порядка имеем следующие соотношения:
Если ![]() , то
, то ![]() ;
;
Если ![]() , то
, то ![]() ,
, ![]() и
и
В итоге получим соотношение:

Тогда вычисление приближенных значений координат точки исходной функции
с
координатами ![]() , исходя из
приближенных значений координат точки
, исходя из
приближенных значений координат точки ![]() ,
по методу Рунге-Кутта второго порядка осуществляется
согласно следующим соотношениям:
,
по методу Рунге-Кутта второго порядка осуществляется
согласно следующим соотношениям:
В данной лабораторной работе метод Рунге-Кутта второго порядка ("METHOD OF RUNGA-KUTTA 2") имеет следующую реализацию:
Итерация с индексом ![]() :
:
На искомом отрезке ![]() при соблюдении условия
при соблюдении условия ![]() , исходя из вводимого или рассчитанного
значения фиксированного шага
, исходя из вводимого или рассчитанного
значения фиксированного шага
![]() (при вводимом значении количества шагов
(при вводимом значении количества шагов ![]() по формуле
по формуле ![]() ,
выбирается абсцисса точки исходной функции с координатами
,
выбирается абсцисса точки исходной функции с координатами ![]() ,
то есть
,
то есть ![]() , согласно
следующему соотношению:
, согласно
следующему соотношению: ![]() .
.
Осуществляется вычисление приближенного значения ординаты точки
исходной
функции с координатами ![]() ,
то есть
,
то есть ![]() , согласно следующим
соотношениям:
, согласно следующим
соотношениям:
Если достигнута истинность выражения ![]() , то итерации
прекращаются, количество шагов итераций
, то итерации
прекращаются, количество шагов итераций ![]() , и
приближенное значение исходной функции
, и
приближенное значение исходной функции ![]() в точке с
координатами
в точке с
координатами ![]() определятся
согласно соотношению
определятся
согласно соотношению ![]() .
.
Если ![]() , то осуществляется переход к следующей
итерации.
, то осуществляется переход к следующей
итерации.
В методе Рунге-Кутта четвертого порядка имеем следующие соотношения:
Если ![]() , то
, то ![]() .
.
Если ![]() , то
, то ![]() ,
, ![]() и
и
Если ![]() , то
, то ![]() ,
, ![]() ,
,
![]() и
и
Если ![]() , то
, то ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и
В итоге получим соотношение:
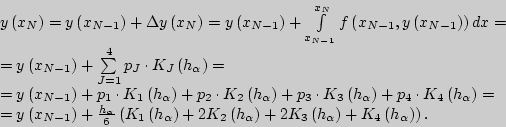
Тогда вычисление приближенного значения координат точки исходной
функции с
координатами ![]() исходя из
приближенных значений координат точки
исходя из
приближенных значений координат точки ![]() по
методу Рунге-Кутта четвертого порядка осуществляется
согласно следующим соотношениям:
по
методу Рунге-Кутта четвертого порядка осуществляется
согласно следующим соотношениям:
В данной лабораторной работе метод Рунге-Кутта четвертого порядка ("METHOD OF RUNGA-KUTTA 4") имеет следующую реализацию:
Итерация с индексом ![]() :
:
На искомом отрезке ![]() при соблюдении условия
при соблюдении условия
![]() , исходя из вводимого или
рассчитанного значения
фиксированного шага
, исходя из вводимого или
рассчитанного значения
фиксированного шага ![]() (при вводимом количестве шагов
(при вводимом количестве шагов
![]() по
формуле
по
формуле ![]() ,
выбирается абсцисса точки исходной функции с координатами
,
выбирается абсцисса точки исходной функции с координатами
![]() ,
то есть
,
то есть
![]() , согласно следующему соотношению:
, согласно следующему соотношению: ![]() .
.
Осуществляется вычисление приближенных значений ординат точки
исходной
функции с координатами ![]() ,
то есть
,
то есть ![]() , согласно соотношениям:
, согласно соотношениям:



Если достигнута истинность выражения ![]() , то итерации
прекращаются, количество шагов итераций
, то итерации
прекращаются, количество шагов итераций ![]() , и
приближенное значение исходной функции
, и
приближенное значение исходной функции ![]() в точке с
координатами
в точке с
координатами ![]() определятся
согласно соотношению
определятся
согласно соотношению ![]() .
.
Если ![]() , то осуществляется переход к следующей
итерации.
, то осуществляется переход к следующей
итерации.